Механика типы связей. Несвободные системы
Тела, рассматриваемые в механике, могут быть свободными и несвободными .
Свободным называют тело, которое не испытывает никаких препятствий для перемещения в пространстве в любом направлении. Если же тело связано с другими телами, которые ограничивают его движение в одном или нескольких направлениях, то оно является несвободным .
Тела, которые ограничивают движение рассматриваемого тела называют связями .
В результате взаимодействия между телом и его связями возникают силы , противодействующие возможным движениям тела . Эти силы действуют на тело со стороны связей и называются реакциями связей.
Реакция связи всегда противоположна тому направлению, по которому связь препятствует движению тела.
Определение реакций связей является одной из наиболее важных задач статики. Ниже приведены наиболее распространенные виды связей, встречающиеся в механике.
Связь в виде гладкой (т. е. без учета сил трения) плоскости или поверхности (рис.а, б ). В этом случае реакция связи всегда направлена по нормали к опорной поверхности .
Связь в виде шероховатой плоскости (рис. в ). Здесь возникают две составляющие реакции: нормальная N , перпендикулярная плоскости, и касательная Т , лежащая в плоскости. Касательная реакция Т называется силой трения и всегда направлена в сторону, противоположную действительному или возможному движению тела.
Полная реакция R , равная геометрической сумме нормальной и касательной составляющих
R =N + Т , отклоняется от нормали к опорной поверхности на некоторый угол ρ .
При взаимодействии тела с реальными связями возникают силы трения . Однако во многих случаях силы трения незначительны и вследствие этого ими часто пренебрегают , т. е. считают связи абсолютно гладкими .
Связи , в которых отсутствуют силы трения , называют идеальными . Приведенная выше связь в виде гладкой плоскости или поверхности относится к категории идеальных .
Гибкая связь, осуществляемая веревкой, тросом, цепью и т. п. (рис. г ). Реакция гибкой связи направлена вдоль связи, причем гибкая связь может работать только на растяжение .
Связь в виде жесткого стержня с шарнирным закреплением концов (рис.д ). Здесь реакции, так же как и в гибкой связи, всегда направлены вдоль осей стержней , но стержни могут быть как растянутыми, так и сжатыми .
Связь, осуществляемая ребром двугранного угла или точечной опорой (рис.е ). Реакция такой связи направлена перпендикулярно поверхности опирающегося тела, если эту поверхность можно считать гладкой .
Существование реакций связей обосновывается . Для определения реакций связей используют прием освобождения от связей.
Вот этот прием. Не изменяя равновесия тела или системы тел, каждую связь, наложенную на систему, можно отбросить, заменив ее действием реакции отброшенной связи.
В процессе изучения статики, которая является одним из составляющих разделов механики, основная роль отводится аксиомам и базовым понятиям. При этом основных аксиом всего пять. Некоторые из них известны со школьных уроков физики, поскольку являются законами Ньютона.
Определение механики
Для начала необходимо упомянуть, что статика является подразделом механики. Последнюю следует описать подробнее, поскольку она напрямую связана со статикой. При этом механика - более общий термин, объединяющий в себе динамику, кинематику и статику. Все эти предметы изучались в школьном курсе физике и известны каждому. Даже входящие в изучение статики аксиомы базируются на известных со школьных лет Однако их было три, в то время как базовых аксиом статики - пять. Большая часть из них касается правил сохранения равновесия и прямолинейного равномерного перемещения определённого тела или материальной точки.
Механикой является наука о наиболее простом способе движения материи - механическом. Наиболее простыми движениями принято считать действия, сводимые к перемещению в пространстве и времени физического объекта из одного положения в другое.
Что изучает механика
В теоретической механике изучаются общие законы движения без учета индивидуальных свойств тела, кроме свойства протяжённости и гравитации (из этого следуют свойства частиц материи взаимно притягиваться либо иметь определенный вес).
В число базовых определений входит механическая сила. Данным термином называется движение, в механической форме передающееся от одного тела второму во время взаимодействия. По многочисленным наблюдениям было определено, что сила считается которая характеризуется направлением и точкой приложения.
По способу построения теоретическая механика схожа с геометрией: она так же базируется на определениях, аксиомах и теоремах. При этом на простых определениях связь не заканчивается. Большая часть рисунков, имеющих отношение к механике в целом и статике в частности, содержит геометрические правила и законы.
Теоретическая механика при этом включает три подраздела: статику, кинематику и динамику. В первой изучаются способы преобразования сил, приложенных к объекту и абсолютно твердому телу, а также условия возникновения равновесия. В кинематике рассматривается простое механическое движение, не учитывающее действующие силы. В динамике изучают движения точки, какой-либо системы или же твёрдого тела, учитывая действующие силы.
Аксиомы статики
Для начала следует рассмотреть основные понятия, аксиомы статики, виды связей и их реакции. Статикой именуется состояние равновесия с силами, которые прилагаются к абсолютно твердому телу. В ее задачи входят два основных пункта: 1 - основные понятия и аксиомы статики включают замену дополнительной системы сил, что были приложены к телу другой системой, эквивалентной ей. 2 - вывод общих правил, при которых тело под влиянием приложенных сил остаётся в покоящимся состояние либо в процессе равномерного поступательного прямолинейного движения.
Объекты в таких системах принято называть материальной точкой - телом, размеры которого в поставленных условиях можно опустить. Совокупность точек или тел, каким-либо образом взаимосвязанных между собой, именуют системой. Силы взаимного воздействия между этими телами зовутся внутренними, а силы, влияющие на данную систему - внешними.
Равнодействующей силой в определённой системе называется сила, эквивалентная приведённой системе сил. Входящие в состав этой системы зовутся составляющими силами. Уравновешивающая сила по своей величине равняется равнодействующей, но направляется в противоположном направлении.

В статике при решении вопроса о смене системы сил, влияющих на твердое тело, или о равновесии сил используют геометрические свойства векторов сил. Из этого становится понятным определение геометрической статики. Аналитическая статика, базирующаяся на принципе допустимых перемещений, будет описана в динамике.
Основные понятия и аксиомы статики
Условия нахождения тела в условиях равновесия выводятся из нескольких основных законов, используемых без дополнительных доказательств, но имеющих подтверждение в виде проведенных опытов, именуются аксиомами статики.
- Аксиома I называется первым законом Ньютона (аксиома инерции). Каждое тело остается в состоянии покоя или равномерного прямолинейного движения до момента, пока сторонние силы не подействуют на это тело, выведя его из данного состояния. Данная способность тела именуется инертностью. Это одно из базовых свойств материи.
- Аксиома II - третий закон Ньютона (аксиома взаимодействия). Когда одно тело воздействует на другое с определенной силой, то второе тело вместе с первым будет действовать на него с определенной силой, которая равна по модулю, противоположна по направлению.
- Аксиома III - условие равновесия двух сил. Чтобы получить равновесие свободного тела, которое находится под влиянием двух сил, достаточно, чтобы данные силы были одинаковы по своему модулю и противоположны по направлению. Это также связано со следующим пунктом и входит в основные понятия и аксиомы статики, равновесие системы сходящих сил.
- Аксиома IV. Равновесие не будет нарушено, если к твердому телу приложить или удалить уравновешенную систему сил.
- Аксиома V - аксиома параллелограмма сил. Равнодействующая двух пересекающихся сил приложена в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах.
Связи и их реакции
В теоретической механике материальной точке, системе и твердому телу может быть дано два определения: свободное и несвободное. Различия между этими словами состоят в том, что если на перемещение точки, тела или системы не налагаются заранее указанные ограничения, то данные объекты будут по определению свободными. В обратной ситуации объекты принято называть несвободными.
Физические обстоятельства, приводящие к ограничению свободы названных материальных объектов, именуются связями. В статике могут иметься простейшие связи, выполняемые разными твердыми или гибкими телами. Сила действия связи на точку, систему или тело именуется реакцией связи.
Виды связей и их реакции
В обычной жизни связь может быть представлена нитями, шнурками, цепями или верёвками. В механике за данное определения принимают невесомые, гибкие и нерастяжимые связи. Реакции соответственно могут быть направлены по нити, веревке. При этом имеют место связи, линии действия которых нельзя определить сразу. В качестве примера основных понятий и аксиомы статикиможно привести неподвижный цилиндрический шарнир.

В его состав входит неподвижный цилиндрический болт, на который надета втулка с цилиндрическим отверстием, диаметр которого не превышает величины болта. При скреплении тела с втулкой первое сможет вращаться лишь по оси шарнира. В идеальном шарнире (при условии пренебрежения трения поверхности втулки и болта) появляется преграда для смещения втулки по направлению, перпендикулярному поверхности болта и втулки. В связи с этим реакция в идеальном шарнире имеет направлении по нормали - радиусу болта. Под влиянием действующих сил втулка способна прижиматься к болту в произвольной точке. В связи с этим направление реакции у неподвижного цилиндрического шарнира заранее определить невозможно. По этой реакции может быть известно лишь ее расположение в плоскости, перпендикулярной к шарнирной оси.
Во время решения задач реакция шарнира будет устанавливаться аналитическим методом путём разложения вектора. Основные понятия и аксиомы статики включают данный способ. Значения проекций реакции вычисляется из уравнений равновесия. Так же поступают в иных ситуациях, включающих невозможность определения направления реакции связи.
Система сходящихся сил
В число основных определений можно включить систему сил, которые сходятся. Так называемой системой сходящихся сил будет называться система, линии действия в которой пересекаются в единственной точке. Данная система приводит к равнодействующей или пребывает в состоянии равновесия. Учитывается данная система и в ранее указанных аксиомах, поскольку связана с сохранением равновесия тела, о чем говорится сразу в нескольких положениях. Последние указывают как на причины, необходимые для создания равновесия, так и на факторы, которые не вызовут изменения данного состояния. Равнодействующая данной системы сходящийся силы равняется векторной сумме названных сил.
Равновесие системы
В основные понятия и аксиомы статики система сходящихся сил также включается при изучении. Для нахождения системы в равновесии механическим условием становится нулевое значение равнодействующей силы. Поскольку векторная сумма сил нулевая, то многоугольник считается замкнутым.

В аналитическом виде условие равновесия системы будет заключаться в следующем: пребывающая в равновесии пространственная система сходящихся сил будет иметь алгебраическую сумму проекций силы на каждую из осей координат, равной нулю. Поскольку в такой ситуации равновесия равнодействующая будет нулевой, то проекции на оси координат также будут нулевыми.
Момент силы
Под данным определением имеется в виду векторное произведение вектора точки приложения сил. Вектор момента силы направлен перпендикулярно плоскости, в которой лежат сила и точка, в ту сторону, откуда поворот от действия силы виден происходящим против хода часовой стрелки.
Пара сил
Этим определением именуется система, состоящая из пары параллельных сил, одинаковых по величине, направленных в противоположные направления и приложенных к телу.
Момент пары сил может считаться положительным, если силы пары направлены против часовой стрелки в правосторонней системе координат, и отрицательным - направлены по направлению часовой стрелки в левой системе координат. При переводе от правой системы координат к левой ориентация сил меняется на противоположную. Минимальное значение расстояния среди линий действия сил именуется плечом. Из этого следует, что момент пары сил является свободным вектором, по модулю равняющимся М=Fh и имеющим перпендикулярно плоскости действия направление, что с вершины данного вектора силы были ориентированы положительно.
Равновесие в произвольных системах сил
Требуемым условием равновесия для произвольной пространственной системы сил, прилагаемой к твердому телу, считается обращение в нуль главного вектора и момента по отношению к любой точке пространства.

Из этого следует, что для достижения равновесия параллельных сил, располагаемых в одной плоскости, требуется и хватит того, что полученная сумма проекций сил на расположенную параллельно ось и алгебраическая сумма всех составляющих моментов, предоставленных сил относительно случайной точки, равняется нулю.
Центр тяжести у тела
Согласно закону всемирного тяготения, на каждую частицу, находящуюся поблизости от поверхности Земли, влияют силы притяжения, именуемыми силами тяжести. При небольших размерах тела во всех технических приложениях можно считать силы тяжести отдельных частиц тела системой практически параллельных сил. Если все силы тяжести частиц мы будем считать параллельными, то их равнодействующая будет численно равна сумме весов всех частиц, т. е. весу тела.
Предмет кинематики
Кинематикой именуется раздел из теоретической механики, который изучает механическое движение точки, системы точек и твердого тела в независимости от влияющих на них сил. Ньютон, исходя из материалистической позиции, считал объективным характер пространства и времени. Ньютон использовал определение абсолютного пространства и времени, но отделял их от перемещающейся материи, поэтому его можно назвать метафизиком. Диалектический материализм считает пространство и время объективными формами пребывания материи. Пространство и времени без материи не может существовать. В теоретической механике сказано, что пространство, включающее движущиеся тела, именуется трёхмерным эвклидовым пространством.
По сравнению с теоретической механикой, теория относительности основывается на иных представлениях о пространстве и времени. Помогло это возникновение новой геометрии, созданной Лобачевским. В отличие от Ньютона, Лобачевский не отделял пространство и время от видения, считая последнее изменением положения одних тел относительно других. В собственном произведении им было указано, что в природе человеком познается только движение, без коего чувственное представление становится невозможным. Из этого следует, что все прочие понятия, к примеру, геометрические, созданы разумом искусственно.
Из этого видно, что пространство рассматривается как проявление связи между перемещающими телами. Почти за век до возникновения теории относительности Лобачевский указал, что евклидова геометрия имеет отношение к абстрактным геометрически системам, тогда как в физическом мире пространственные взаимоотношения определяются физической геометрией, которая отличается от евклидовой, в которой свойства времени и пространства объединяются со свойствами материи, перемещающейся в пространстве и времени.

Не помешает заметить, что передовые ученые из России в области механики сознательно придерживались верных материалистических позиций в трактовке всех главных определений теоретической механики, в частности времени и пространства. При этом мнение о пространстве и времени в теории относительности сходны с представлениями о пространстве и времени сторонников марксизма, которые были созданы до возникновения работ о теории относительности.
При работе с теоретической механикой во время измерения пространства за главную единицу принимается метр, а за время - секунда. Время является одинаковым в каждой системе отсчета и находится вне зависимости от перемежения данных систем по отношению друг к другу. Время указывается символом и рассматривается в виде непрерывной изменчивой величины, используемой в роли аргумента. Во время измерения времени применяются определения промежутка времени, момента времени, начального времени, что входит в основные понятия и аксиомы статики.
Техническая механика
В практическом применении основные понятия и аксиомы статики и техническая механика связаны между собой. В технической механике изучается как сам механический процесс движения, так и возможность его использования в практических целях. К примеру, при создании технических и строительных конструкций и проверки их на прочность, что требует знать кратко основные понятия и аксиомы статики. При этом такое краткое изучение подойдет только любителям. В профильных учебных заведениях эта тема имеет немалую важность, к примеру, в случае с системой сил, основными понятиями и аксиомами статики.

В технической механике так же применяются приведенные выше аксиомы. К 1, основные понятия и аксиомы статики связаны с данным разделом. При том что в самой первой аксиоме объясняется принцип сохранения равновесия. В технической механике немаловажная роль отводится не только созданию приборов, но и при строительстве которых устойчивость и прочность являются основными критериями. Однако создать нечто подобное без знания базовых аксиом будет невозможно.
Общие замечания
К наиболее простым формам перемещения твердых тел относят поступательное и вращательное движение тела. В кинематике твердых тел при разных видах движений учитываются кинематические характеристики перемещения разных его точек. Вращательным движением тела вокруг неподвижной точки именуется такое движение, при котором прямая проходящая сквозь пару произвольных точек в процессе движения тела сохраняется в состоянии покоя. Данная прямая именуется осью вращения тел.
В тексте выше приводились кратко основные понятия и аксиомы статики. При этом существует большое количество сторонней информации, с помощью которой можно лучше узнать статику. Не стоит забывать базовые данные, в большинстве примеров основные понятия и аксиомы статики абсолютно твердое тело включают, поскольку это некий эталон для объекта, который может быть не достижим в нормальных условиях.
Затем следует вспомнить об аксиомах. К примеру, основные понятия и аксиомы статики, связи и их реакции входят в их число. Несмотря на то, что многие аксиомы лишь объясняют принцип сохранения равновесия или равномерного движения, это не отменяет их значимости. Начиная со школьного курса данные аксиомы и правила изучаются, поскольку являются всем известными законами Ньютона. Необходимость в их упоминании связана с практическим применением сведений статики и механики в целом. Примером послужила техническая механика, в которой, помимо создания механизмов, требуется понимать принцип конструирования устойчивых построек. Благодаря таким сведениям возможно правильное возведение обычных сооружений.
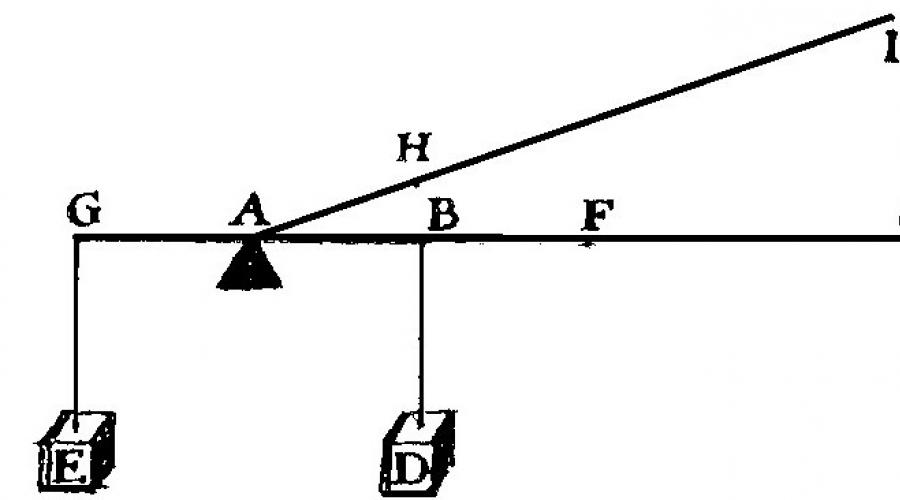
Рассмотрим тело, которое может перемещаться без трения по гладкой горизонтальной поверхности (Рис.1а ).
Пусть в качестве активной силы выступает сила веса $\vec{Р}$, приложенная в его центре тяжести. Реакция связи $\vec{N}$ представлена силой, распределенной по плоскости нижней грани этого тела, и ее можно считать приложенной в центре этой грани.
Принципиально картина не меняется, если поверхность тела или связи будет гладкой, но криволинейной (Рис.1б ).
Пусть тело в виде бруса с гладкой поверхностью опирается в точке А на идеально гладкую поверхность, а в точке В – на уступ (Рис.1в ).
Нетрудно догадаться, что тело не сможет находиться в равновесии, если в качестве активной силы выступает его собственный вес, однако равновесие возможно, если к этому брусу приложить некоторую другую внешнюю силу $\vec{F}$. При этом, как будет показано в следующей главе, равновесие возможно только в том случае, если линия действия этой силы проходит через точку пересечения линий действия реакций $R_A$ и $R_B$.
Итак, по поводу этого типа связи можно сделать следующий вывод: реакция идеально гладкой поверхности приложена в точке касания и направлена по нормали к поверхности тела или связи .
2. Гибкая невесомая и нерастяжимая нить. Рассмотрим тело, которое подвешено на двух таких нитях и находится в равновесии под действием собственного веса и реакций нитей, прикрепленных к телу в точках А и В (Рис.2 слева ).
Слева: Гибкая невесомая и нерастяжимая нить
слева
)
справа
)
Реакция связи равна силе натяжения нити, она направлена вдоль нити и от тела, которое эта нить удерживает.
3. Жесткий невесомый прямолинейный стержень. Реакция направлена вдоль стержня , который, в отличие от нити, может воспринимать как растягивающие ($\vec{S_B}$), так и сжимающие ($\vec{S_A}$) усилия (Рис.2 справа ).
Справа : Жесткий невесомый прямолинейный стержень
Гибкая невесомая и нерастяжимая нить (слева
)
Жесткий невесомый прямолинейный стержень (справа
)
Допускает перемещение закрепленным таким образом точки тела только вдоль опорной плоскости (Рис.3а ).
Реакция направлена перпендикулярно заштрихованной опорной площадке.
В учебной литературе этот вид связи также называют подвижным цилиндрическим шарниром .
Помимо стандартного обозначения, предусмотренного ГОСТом, на схемах эту связь изображают так, как показано на рис.3б .
Отметим, что четыре рассмотренные связи имеют одну общую особенность: соответствующие им реакции известны по направлению и неизвестны по величине. То есть с точки зрения алгебры каждая из этих реакций соответствует только одному неизвестному .
Препятствует перемещению закрепленной таким образом точки тела в горизонтальном и вертикальном направлениях. Это означает, что в общем случае реакция $\vec{R_A}$ такой связи неизвестна по величине и по направлению . В качестве неизвестных при ее определении можно выбрать модуль реакции – $|\vec{R_A}|$ и угол $\varphi$, который она образует с осью Ox , либо проекции вектора $\vec{R_A}$ на оси координат: R AX , R AY (Рис.4а ).
Эта связь допускает поворот тела вокруг рассматриваемой точки, поэтому в учебной литературе эту связь также называют неподвижным цилиндрическим шарниром.
Помимо стандартного обозначения, предусмотренного ГОСТом, на схемах она изображается так, как показано на рис.4б .
6. Сферический шарнир. В отличие от цилиндрического шарнира не допускает перемещения закрепленной таким образом точки тела в трех взаимно перпендикулярных направлениях. В качестве неизвестных при ее определении выбирают проекции этой реакции на оси координат: R AX , R AY , R AZ (Рис.5 ).
Просмотр: эта статья прочитана 65709 раз
Pdf Выберите язык... Русский Украинский Английский
Краткий обзор
Полностью материал скачивается выше, предварительно выбрав язык
Техническая механика
Современное производство, определяющееся высокой механизацией и автоматизацией, предлагает использование большого количества разнообразных машин, механизмов, приборов и других устройств. Конструирование, изготовление, эксплуатация машин невозможна без знаний в области механики.
Техническая механика - дисциплина, вмещающая в себя основные механические дисциплины: теоретическую механику, сопротивление материалов, теорию машин и механизмов, детали машин и основы конструирования.
Теоретическая механика - дисциплина, которая изучает общие законы механического движения и механического взаимодействия материальных тел.
Теоретическая механика принадлежит к фундаментальным дисциплинам и создает основу многих инженерных дисциплин.
В основе теоретической механики лежат законы, называемые законами классической механики или законами Ньютона. Эти законы установлены путем обобщения результатов большого количества наблюдений и экспериментов. Справедливость их проверена многовековой практической деятельностью человека.
Статика - раздел теоретической механики. в котором изучаются силы, методы преобразования систем сил в эквивалентные и устанавливаются условия равновесия сил, приложенные к твердым телам.
Материальная точка - физическое тело определенной массы, размерами которого можно пренебречь при изучении его движения.
Система материальных точек или механическая система - это такая совокупность материальных точек, в которой положение и движение каждой точки зависят от положения и движения других точек этой системы.
Твердое тело является системой материальных точек.
Абсолютно твердое тело - тело, в котором расстояния между двумя произвольными его точками остаются неизменными. Считая тела абсолютно твердыми, не учитывают деформаций, которые возникают в реальных телах.
Сила F - величина, являющаяся мерой механического взаимодействия тел и определяющей интенсивность и направление этого взаимодействия.
Единицей измерения силы в системе СИ является ньютон (1 Н).
Как и для любого вектора, для силы можно найти проекции силы на оси координат.
Виды сил
Внутренними силами называют силы взаимодействия между точками (телами) данной системы
Внешними силами называются силы, действующие на материальные точки (тела) данной системы со стороны материальных точек (тел), не принадлежащих этой системе. Внешние силы (нагрузка) - это активные силы и реакции связи.
Нагрузки разделяются на:
- объемные - распределенные по объему тела и приложенные к каждой ее частице (собственный вес конструкции, силы магнитного притягивания, силы инерции).
- поверхностные
- приложенные к участкам поверхности и характеризующие непосредственное контактное взаимодействие объекта с окружающими телами:
- сосредоточенные - нагрузки, действующие по площадке, размеры которой малы сравнительно с размерами самого элемента конструкции (давление обода колеса на рельс) ;
- распределенные - нагрузки, действующие по площадке, размеры которой не малы сравнительно с размерами самого элемента конструкции (гусеницы трактора давят на балку моста); интенсивность нагрузки, распределенной вдоль длины элемента, q Н/м.
Аксиомы статики
Аксиомы отображают свойства сил, действующих на тело.
1.Аксиома инерции
(закон Галилея)
.
Под действием взаимно уравновешенных сил материальная точка (тело) находится в состоянии покоя или движется равномерно и прямолинейно.
2.Аксиома равновесия двух сил
.
Две силы, приложенные к твердому телу, будут уравновешенные только в случае, когда они равны по модулю и направлены вдоль одной прямой в противоположную сторону.
Вторая аксиома является условием равновесия тела под действием двух сил.
3.Аксиома добавления и отбрасывания уравновешенных сил.
Действие данной системы сил на абсолютно твердое тело не изменится, если к ней прибавить или изъять любую уравновешенную систему сил.
Следствие
. Не изменяя состояние абсолютно твердого тела, силу можно переносить вдоль ее линии действия в любую точку, сохраняя неизменными ее модуль и направление. Т.е., сила, приложенная к абсолютно твердому телу, является скользящим вектором.
4. Аксиома параллелограмма сил.
Равнодействующая двух сил, которые пересекаются в одной точке, приложена в точке их сечения и определяется диагональю параллелограмма, построенного на этих силах как сторонах.
5. Аксиома действия и противодействия.
Каждому действию соответствует равное по модулю и противоположное по направлению противодействие.
6. Аксиома равновесия сил, приложенных к деформируемому телу при его затвердевании (принцип затвердевания).
Равновесие сил, приложенных к деформируемому телу (изменяемой системе), сохраняется, если тело считать затвердевшим (идеальным, неизменным).
7. Аксиома освобождения тела от связей.
Не изменяя состояния тела, любое несвободное тело, можно рассматривать как свободное, если отбросить связи, а их действие заменить реакциями.
Связи и их реакции
Свободным телом называется такое тело, которое может осуществлять произвольные перемещения в пространстве в любом направлении.
Связями называются тела, ограничивающие движение данного тела в пространстве.
Свободным телом называется тело, перемещение которого в пространстве ограниченно другими телами (связями).
Реакцией связи (опоры) называется сила, с которой связь действует на данное тело.
Реакция связи всегда направлена противоположно тому направлению, в котором связь противодействует возможному движению тела.
Активная (заданная) сила , это сила, которая характеризует действие других тел на заданное, и вызывает или может вызвать изменение его кинематического состояния.
Реактивная сила - сила, которая характеризует действие связей на данное тело.
По аксиоме об освобождении тела от связей, любое несвободное тело можно рассматривать как свободное, освободив его от связей и заменив их действие реакциями. В этом заключается принцип освобождения от связей.
Система сходящихся сил
Система сходящихся сил − это система сил, линии действия которых пересекаются в одной точке.
Система сходящихся сил эквивалентная одной силе - равнодействующей , которая равняется векторной сумме сил и приложенная в точке сечения линий их действия.
Методы определения равнодействующей системы сходящихся сил.
- Метод параллелограммов сил - На основании аксиомы параллелограмма сил, каждые две силы данной системы, последовательно, приводятся к одной силе − равнодействующей.
- Построение векторного силового многоугольника - Последовательно, параллельным переносом каждого вектора силы в конечную точку предыдущего вектора, составляется многоугольник, сторонами которого являются векторы сил системы, а замыкающей стороной − вектор равнодействующей системы сходящихся сил.
Условия равновесия системы сходящихся сил.
- Геометрическое условие равновесия сходящейся системы сил: для равновесия системы сходящихся сил необходимо и достаточно, чтобы векторный силовой многоугольник, построенный на этих силах, был замкнутым.
- Аналитические условия равновесия системы сходящихся сил: для равновесия системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на координатные оси равнялись нулю.
Язык: русский, украинский
Формат: pdf
Размер: 800 КВ
Пример расчета прямозубой цилиндрической передачи
Пример расчета прямозубой цилиндрической передачи. Выполнен выбор материала, расчет допускаемых напряжений, расчет на контактную и изгибную прочность.
Пример решения задачи на изгиб балки
В примере построены эпюры поперечных сил и изгибающих моментов, найдено опасное сечение и подобран двутавр. В задаче проанализировано построение эпюр с помощью дифференциальных зависимостей, провелен сравнительный анализ различных поперечных сечений балки.
Пример решения задачи на кручение вала
Задача состоит в проверке прочности стального вала при заданном диаметре, материале и допускаемых напряжениях. В ходе решения строятся эпюры крутящих моментов, касательных напряжений и углов закручивания. Собственный вес вала не учитывается
Пример решения задачи на растяжение-сжатие стержня
Задача состоит в проверке прочности стального стержня при заданных допускаемых напряжениях. В ходе решения строятся эпюры продольных сил, нормальных напряжений и перемещений. Собственный вес стержня не учитывается
Применение теоремы о сохранении кинетической энергии
Пример решения задачи на применение теоремы о сохранение кинетической энергии механической системы
Все теоремы и уравнения статики выво-дятся из нескольких исходных положений, принимаемых без матема-тических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике.
Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F 1 = F 2) и направлены вдоль одной прямой в противоположные стороны (рис. 10).
Рис.10
Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равнове-сии не может.
Аксиома 2. Действие данной си-стемы, сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Эта аксиома устанавливает, что две системы сил, отличающиеся на уравнове-шенную систему, эквивалентны друг другу.
Следствие из 1-й и 2-й аксиом. Действие силы на абсо-лютно твердое тело не изменится, если перенести точку при-ложения силы вдоль ее линии действия в любую другую точку тела.
Рис.11
В самом деле, пусть на твердое тело действует приложенная в точке А сила (рис.11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы и , такие, что = , = . От этого действие силы на тело не изменится. Но силы и со-гласно аксиоме 1 также образуют уравновешенную систему, которая может быть отброшена. В резуль-тате на тело. Будет действовать только одна сила , равная , но приложен-ная в точке В .
Таким образом, вектор, изобра-жающий силу , можно считать приложенным в любой точке на линии действия силы (такой вектор называется скользящим).
Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю па-раллелограмма, построенного на этих силах, как на сторонах.
Вектор , равный диагонали параллелограмма, построенного на векторах и (рис.12), называется геометрической суммой векторов и : = + .
Рис.12
Величина равнодействующей
|
Конечно, Такое равен-ство будет соблюдаться только при условии, что эти силы направлены по одной пря-мой в одну сторону. Если же векторы сил окажутся перпендикулярными, то
Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействую-щую, равную геометрической (векторной) сумме этих сил и прило-женную в той же точке.
Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но проти-воположное по направлению противодействие.
Закон о равенстве действия и противодей-ствия является одним из основных законов ме-ханики. Из него следует, что если тело А дей-ствует на тело В с силой , то одновременно тело В действует на тело А с такой же по модулю и направленной вдоль той же прямой, но противоположную сторону силой = (рис. 13). Однако силы и не образуют урав-новешенной системы сил, так как они приложены к разным телам.
Рис.13
Аксиома 5 (принцип отвердевания). Равновесие изме-няемого (деформируемого) тела, находящегося под действием дан-ной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).
Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сва-ренными друг с другом и т. д.
Связи и их реакции.
По определению, тело, которое не скреплено с другими телами и может совершать из данного положе-ния любые перемещения в пространстве, называется свободным (например, воздушный шар в воздухе). Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным . Все то, что ограничивает перемещения данного тела в пространстве, будем называть связью.
Например, тело лежащее на столе - несвободное тело. Связью его является плоскость стола, которая препятствует перемещению тела вниз.
Очень важен так называемый принцип освобождаемости , которым будем пользоваться в дальнейшем. Записывается он так.
Любое несвободное тело можно сделать свободным, если связи убрать, а действие их на тело заменить силами, такими, чтобы тело оставалось в равновесии.
Сила, с которой данная связь действует на тело, препятствуя тем ила иным его перемещениям, называется силой реакции (противодействия) связи или просто реакцией связи.
Так у тела, лежащего на столе, связь - стол. Тело несвободное. Сделаем его свободным - стол уберем, а чтобы тело осталось в равнове-сии, заменим стол силой, направленной вверх и равной, конечно, весу тела.
Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Когда связь одновременно препятствует перемещениям тела по нескольким направлениям, направление реакции связи также наперед неизвестно и должно определяться в результате решения рассматриваемой задачи.
Рассмотрим, как направлены реакции некоторых основных видов связей .
1. Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность, трением о которую данного тела можно в первом приближении пренебречь. Такая поверхность не дает телу перемещаться только по направлению общего перпен-дикуляра (нормали) к поверхностям соприкасающихся тел в точке их касания (рис. 14,а ). Поэтому реакция N гладкой поверхности или опоры направлена по общей нормали к поверхностям сопри-касающихся тел в точке их касания и приложена в этой точке. Когда одна из соприкасающихся поверхностей является точкой (рис. 14,б ), то реакция направлена по нормали к другой поверх-ности.
Если поверхности не гладкие, надо добавить еще одну силу - силу трения , которая направлена перпендикулярно нормальной реакции в сторону, противоположную возможному скольжению тела.
Рис.14 Рис.15
Рис.16
2. Нить. Связь, осуществленная в виде гибкой нерастяжимой нити (рис.15), не дает телу М удаляться от точки подвеса нити по направлению AM . Поэтому реакция Т натянутой нити направлена вдоль нити от тела к точке ее подвеса. Если даже заранее можно догадаться, что реакция направлена к телу, все равно ее надо направить от тела. Таково правило. Оно избавляет от лишних и ненужных предположений и, как убедимся далее, помогает установить сжат стержень или растянут.
3. Цилиндрический шарнир (подшипник). Если два тела соединены болтом, проходящим через отверстия в этих телах, то такое соединение называется шарнирным или просто шарниром; осевая линия болта называется осью шарнира. Тело АВ , прикреплен-ное шарниром к опоре D (рис.16,а ), может поворачиваться как угодно вокруг оси шарнира (в плоскости чертежа); при этом конец А тела не может переместиться ни по какому направлению, перпен-дикулярному к оси шарнира. Поэтому реакция R цилиндрического шарнира может иметь любое направление в плоскости, перпен-дикулярной к оси шарнира, т.е. в плоскости А ху. Для силы R в этом случае наперед не известны ни ее модуль R , ни направле-ние (угол ).
4. Шаровой шарнир и подпятник. Этот вид связи закреп-ляет какую-нибудь точку тела так, что она не может совершать никаких перемещений в пространстве. При-мерами таких связей служат шаровая пята, с помощью которой прикрепляется фото-аппарат к штативу (рис.16,б ) и подшипник с упором (подпятник) (рис. 16,в ). Реакция R шарового шарнира или подпятника может иметь любое направление в пространстве. Для нее наперед неизвестны ни модуль реакции R , ни углы, образуемые ею с осями х, у, z .
Рис.17
5. Стержень. Пусть в какой-нибудь конструкции связью является стержень АВ , закрепленный на концах шарнирами (рис.17). Примем, что весом стержня по сравнению с воспринимаемой им нагрузкой можно пре-небречь. Тогда на стержень будут действовать только две силы при-ложенные в шарнирах А и В . Но если стержень АВ находится в равновесии, то по аксиоме 1 приложенные в точках А и В силы должны быть направлены вдоль одной прямой, т. е. вдоль оси стержня. Следовательно, нагруженный на концах стержень, весом ко-торого по сравнению с этими нагрузками можно пренебречь, работает только на растяжение или на сжатие. Если такой стержень является связью, то реакция стержня будет направлена вдоль оси стержня.
6. Подвижная шарнирная опора (рис.18, опора А ) препятствует движению тела только в направ-лении перпендикулярном плоскости скольжения опоры. Реакция такой опоры направлена по нормали к поверхности, на которую опираются катки подвижной опоры.
7. Неподвижная шарнирная опора (рис.18, опора В ). Реакциятакой опоры проходит через ось шарнира и может иметь любое направление в плоскости чертежа. При решении задач будем реакцию изображать ее составляющими и по направлениям осей координат. Если мы, решив задачу, найдем и , то тем самым будет определена и реакция ; по модулю
Рис.18
Способ закрепления, показанный на рис.18, употребляется для того, чтобы в балке АВ не возникало дополнительных напряжений при изменении ее длины от изменения температуры или от изгиба.
Заметим, что если опору А балки (рис.18) сделать тоже непо-движной, то балка при действии на нее любой плоской системы сил будет статически неопределимой, так как тогда в три уравнения равновесия вой-дут четыре неизвестные реакции , , , .
8. Неподвижная защемляющая опора или жесткая заделка (рис.19). В этом случае на заделанный конец балки со стороны опорных плоско-стей действует система распределенных сил реакций. Считая эти силы приведен-ными к центру А
Иногда приходится исследовать равновесие нетвердых тел. При этом будем пользоваться предположением, что если это нетвердое тело находится в равновесии под действием сил, то его можно рассматривать как твердое тело, используя все правила и методы статики.